ASTRIIS develops a multi-robot adaptive sensing system for ocean observation
Ocean fronts, an important ocean phenomenon that is hard to spot
Although the ocean may look very static to the naked eye, it is composed by multiple bodies of water that are in permanent movement and play a key role in the functioning of the planet and in its biodiversity, including human life. For example, the cities of Porto (Portugal) and New York (USA) are roughly located at the same latitude. While it rarely snows in Porto (or anywhere in the Portuguese coast for that matter), NYC (and most of US Eastern Seaboard) is famous also for its blizzards. The ocean circulation – namely, the Gulf Stream – ensure that western Europe is much less cold than the opposed margin of the North Atlantic.
The seawater follows fluid dynamics, just like the air does. Water with higher density will move towards places with lower water density. What makes the density vary in the water is both the temperature and its salinity, so these are the variables that ocean scientists need to know in depth to understand how the ocean functions and to forecast how it may change.
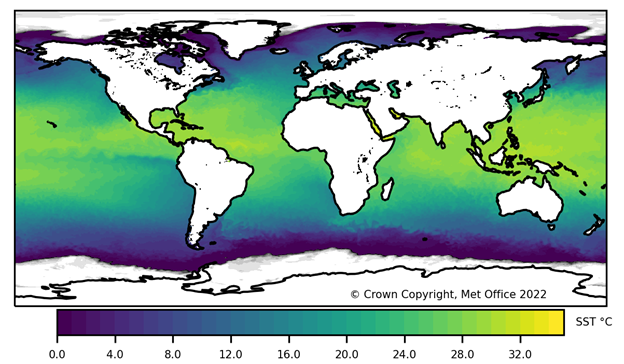
When two bodies of water with different densities meet, a lot of turbulence and other interesting things happen at surface and under the water. One of such things are called ocean fronts. Many scientists have devoted their lives studying them. Although there are satellite products that can sense the ocean’s temperature, such data only show how temperature changes at the surface and with low resolution.
Within the scope of ASTRIIS, FEUP and OceanScan-MST have been developing new technology to automatically acquire ocean data, at the surface and underwater, where ocean fronts form. Such goal is becoming a possibility with multiple smart robots that work collaboratively to produce 3D models of the ocean.
Adaptive sensing using multiple robots
Identifying, accessing, and monitoring ocean fronts while they occur is no easy task. The ocean is a big, often rough, playing field. One way to monitor vast areas of the ocean is to navigate through its waters at a relatively fast speed and to slow down when and where the properties of the water start changing. This allows to obtain more water samples where it matters most, optimising the time onboard during a research expedition. By adapting both the way the sampling station moves and the sampling frequency – this applies to both manned ships and robots – is called adaptive sampling.
A fleet of multiple Light Autonomous Underwater Vehicles (LAUV) robots can work as a network so that their coordinated action allows to monitor larger areas of interest with much more detail. They can start by being spread out in the ocean and, if one robot detects a feature of interest like an ocean front, the others can join and contribute to obtain much more data.

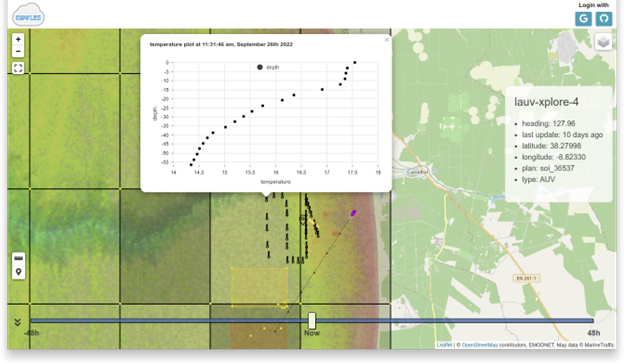
Within the context of ASTRIIS, LAUVs equipped with CTD (conductivity, temperature and depth) sensors have been used to collect data off the coast of Portugal. Such data is sent by the LAUV in near real-time through satellite communications to Ripples, FEUP’s a cloud-based service that receives all the data and stores the actions executed by each of the robots. On land, faraway away from where the feature of interest is occurring, scientists can analyse the data and decide where the robots’ fleet should go and how they should act.
Stay tuned to the ASTRIIS website and LinkedIn for further developments on this and other ongoing project activities.